Last year, Hwa Chong Infocomm and Robotics Society has achieved stellar results at the Robocup Singapore Open and we are honored to send 2 teams to represent Singapore at RoboCup Montreal in June. The JC team, Chicken McNuggets, participated in the RoboCup Junior Rescue Line category and emerged champions in Singapore. The win was unexpected as we had barely edged out National Junior College team for 1st place after the final round. Hence, it was a pleasant surprise.
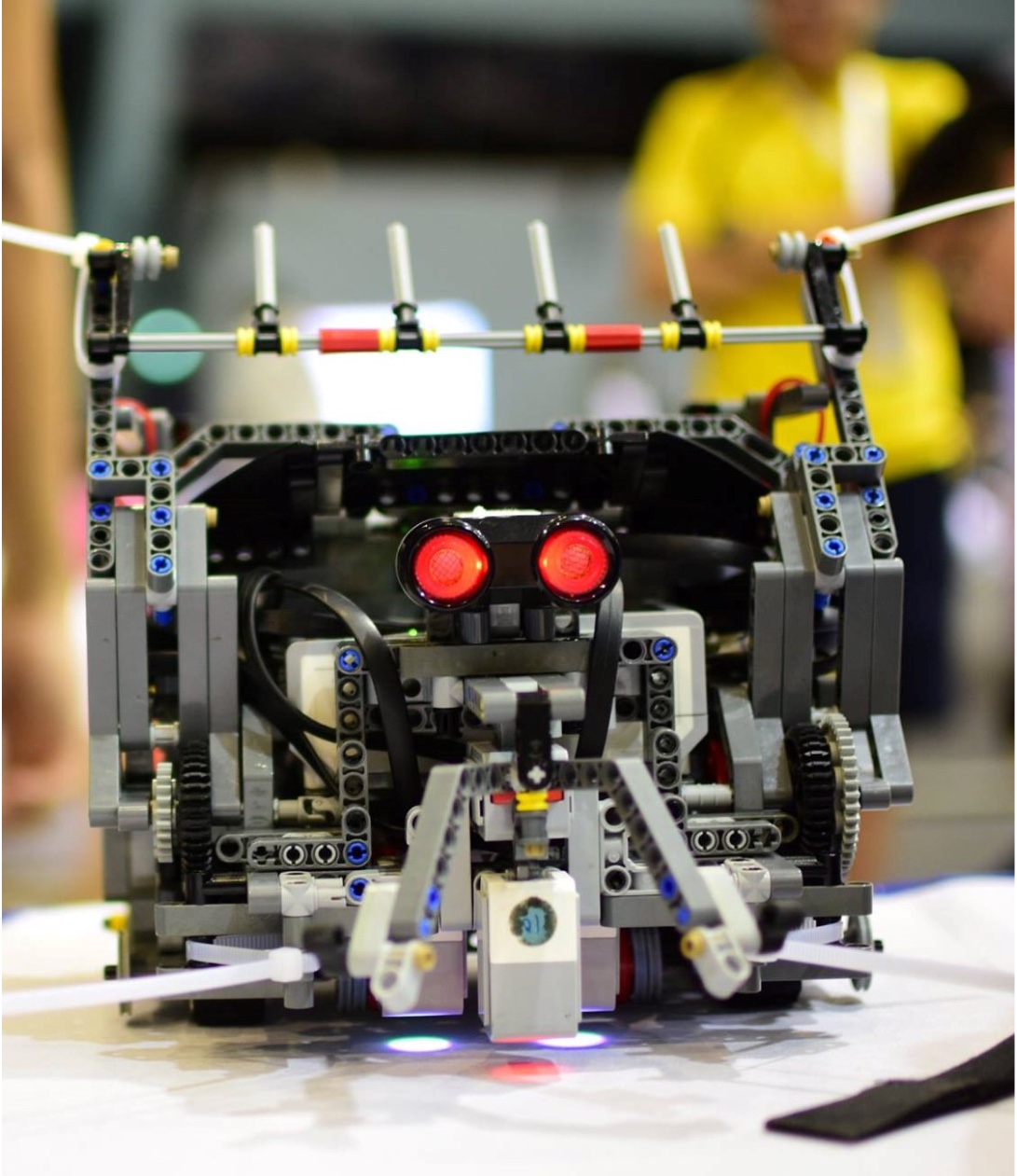
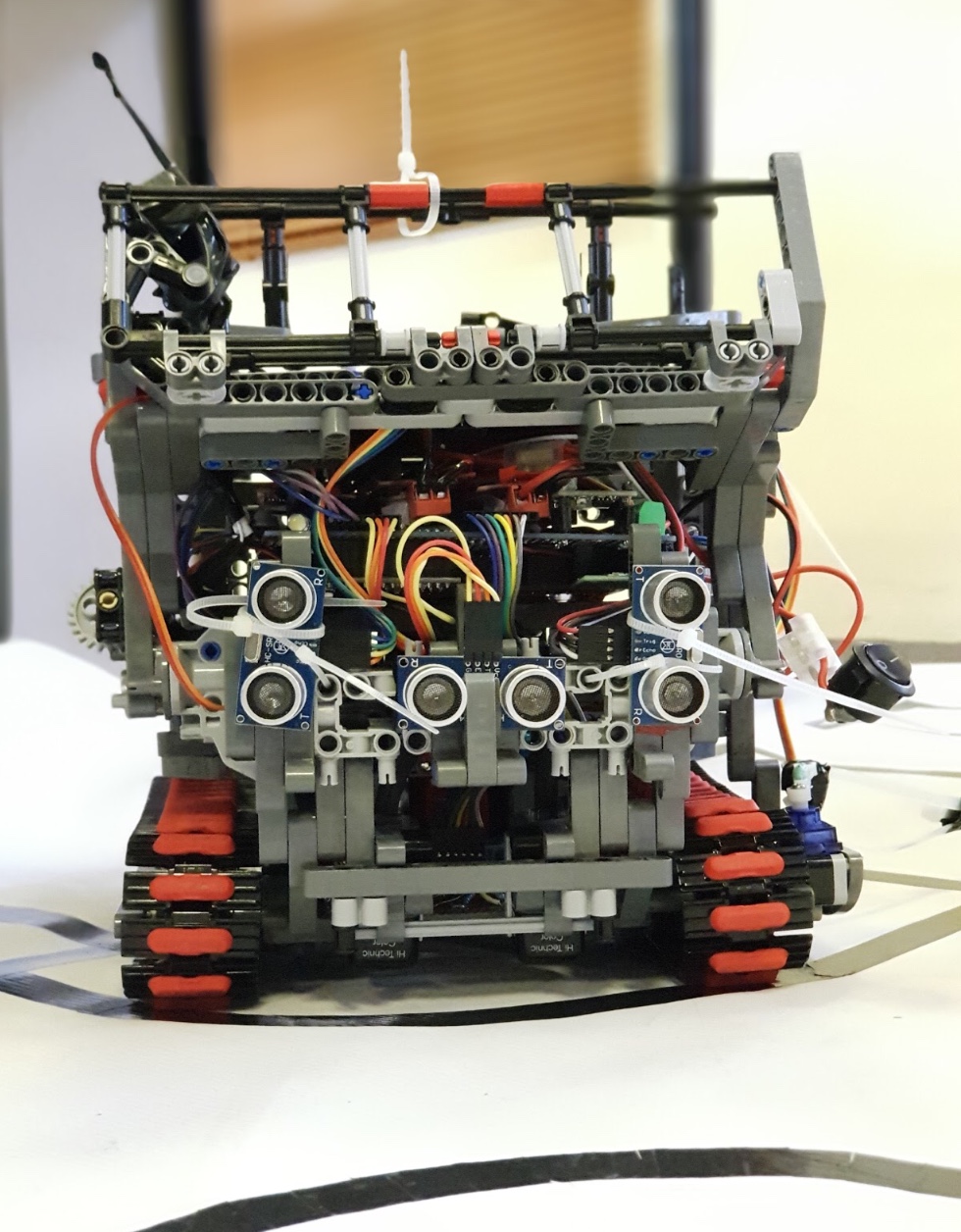
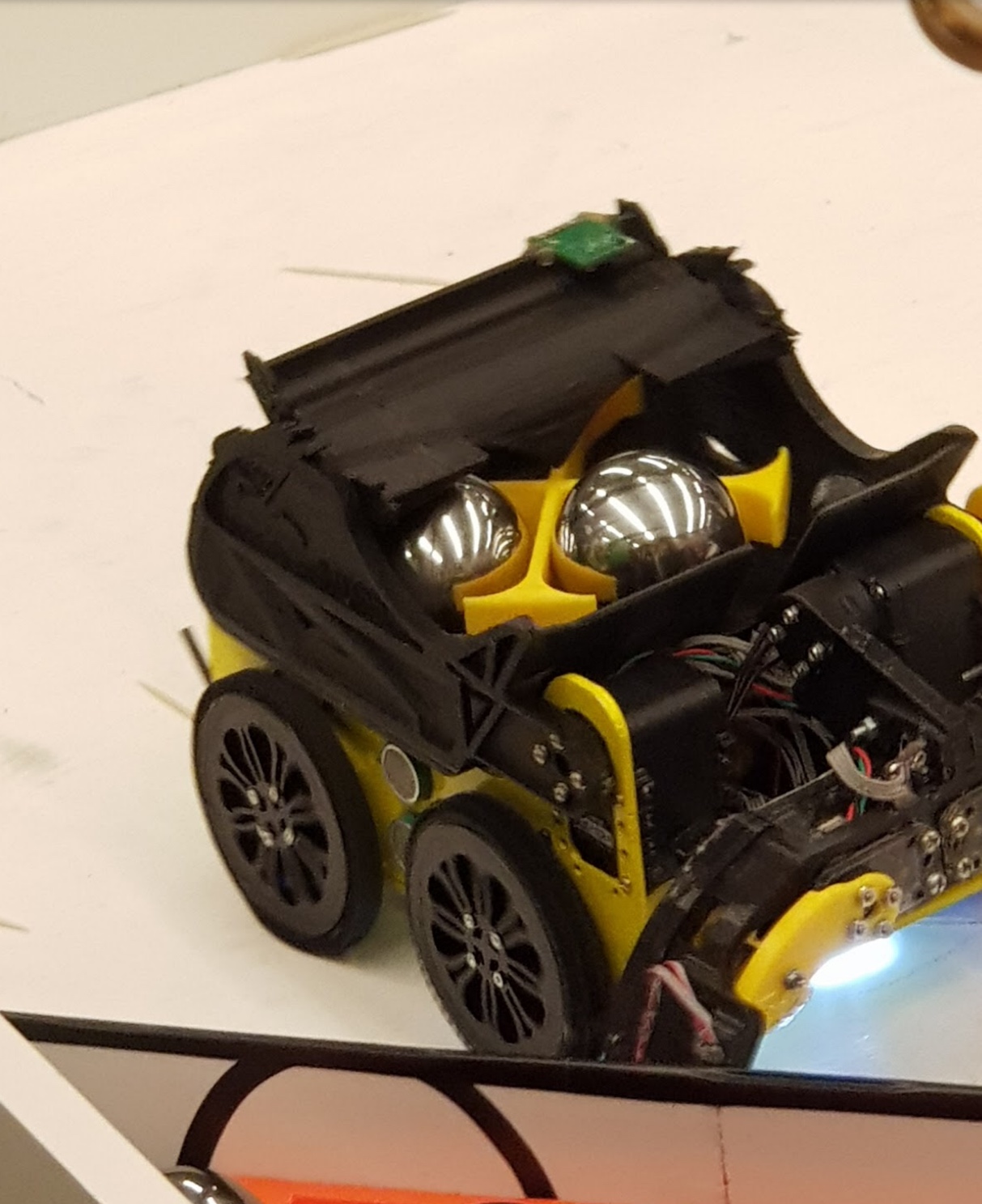
After Singapore Open, we felt that our EV3 controlled robot could not compete at an international level and thus, decided to switch to Arduino, which has much better capabilities and flexibility. It was an uphill task as none of us had any experience with Arduino and we only had less than 2 months to rebuild the robot from scratch, all while juggling heavy academics commitments.
This year, RoboCup was held in Montreal, Canada from 18 June to 22 June, with 4000 participants from 35 countries and over 5000 robots competing.

Day 1:
On first day of the competition, we had the opportunity to practice on the practice field after registration. For the first time, we saw the other teams’ robots and we were amazed at the huge variety of robots and how unique some robot designs were. Some teams even used different types of microcontrollers and programming language which we had never seen before.

Day 2:
The competition officially began. After our first run, we realised that our compass was not calibrated properly. As a result, the robot’s turning was very inaccurate. We tried re-calibrating but made no progress. Throughout the 4 runs, the compass did not work at all. This was partly due to the difference in magnetic field strength between Singapore and Canada as well as our limited understanding of the compass. In addition, the turns in the evacuation room were not properly calibrated and were not consolidated with the main line tracking program. Hence, there were delays and the program was not put together properly until the end of the day.
Day 3:
The playfields became more complicated and an an obstacle was even included in the middle. Additionally, sticks were scattered onto the playfields which intentionally covered up a significant portion of the intersections and thus, posed a challenge to us as the sticks got caught underneath the robot and affected the light array values. Thus, we decided that some of us would work on a backup robot after the 5th run, which is controlled by EV3 as the main robot could not function to its fullest potential. It gave us something which we were more comfortable with to fall back on given that we used EV3 during the SG Open.

Day 4:
On the final day of the team competition, the playfields were merged into 1 single playfield which had 2 robots running together on a single field at the same time. The difficulty level had significantly increased, given its extremely long course, and long ramp which was elevated.

Unfortunately, despite our valiant efforts to rectify the line tracking program, many problems occurred throughout the 10 runs for line tracking and the main robot did not have much success.
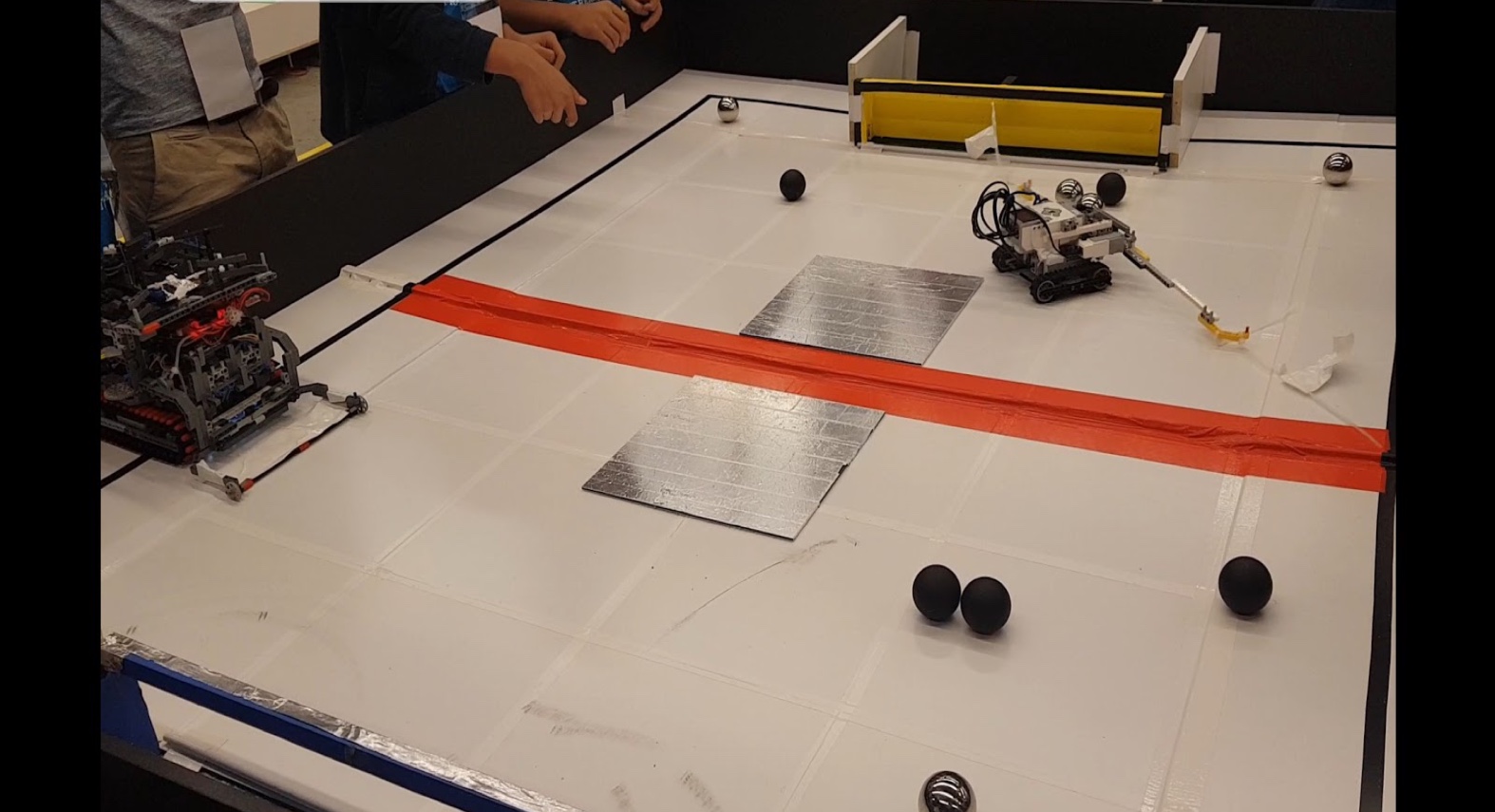
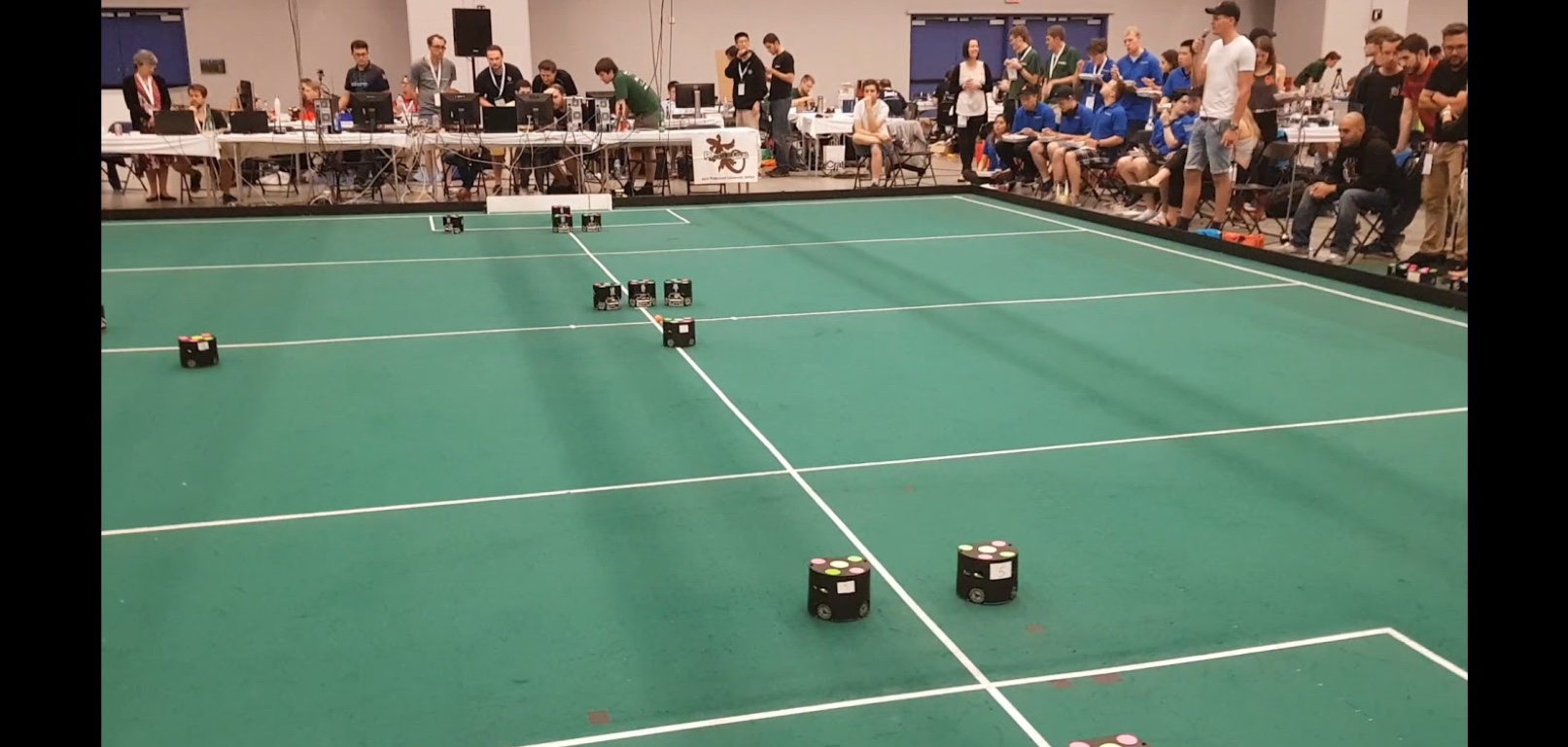
Later during the 4th day, the superteam challenge was announced. This challenge incorporated many components from soccer while collaborating with another team. With the field divided into 2, we had to work with a team from the United States to collect balls (victims), and deposit the dead and alive victims (black and silver balls respectively) into their corresponding goalposts without crossing over to the other side of the field. We quickly worked out a strategy which was simple yet innovative and finished with a respectable ranking of 6/7th.
As a whole, we were disappointed that our robot did not perform as well as we hoped on an international stage and only placed 29th out of 38 teams. However, it had been a very fruitful and meaningful experience for us all. We came a long way from when we first started working on the robot. We were also glad that we managed to learn Arduino from scratch within 2 months without much external guidance while juggling our studies at the same time.
Another takeaway from this experience was to not be too ambitious as we wasted valuable time and money trying to get an OpenMV camera to work for victim detection in the evacuation room, but ended up scrapping the project in favour of a more reliable and simple strategy of simply sweeping the room.
Through this international competition, we had the opportunity to interact with our fellow competitors and learnt from one another by watching their runs. We were able to pick out interesting mechanism designs to collect the victims and learnt different types of strategies which we never thought of before.
We enjoyed touring around the venue to see the other leagues in action like small size soccer league, humanoid soccer, industrial league and many more. It exposed us to how diverse the field of engineering and robotics could be. Certainly, it has been an eye opening and enriching experience for us.
In conclusion, we are extremely grateful for the opportunity to represent Singapore at RoboCup 2018. We fostered many meaningful friendships at RoboCup and learnt a lot from others. With the experience we gained, HC Robotics will definitely come back stronger and better next year, and we will definitely strive to represent Singapore again at RoboCup Sydney 2019 in all categories.


Reflections by members
Deng Jun: I’m extremely grateful for the opportunity to be able to participate in RoboCup Montreal. It was a fruitful experience for me as I got the opportunity to be exposed to a different side of robotics which is a rare for most people in Singapore. However, I feel that I could have contributed more towards the technical aspects of the robot given that I was in-charge of integrating a camera into our robot, which we eventually scrapped in favour of a simpler, less complicated method.
Ho Chi: This entire robocup journey was enjoyable and I learned a lot from it. I was mainly responsible for the circuitry and partially for the programming, and although I felt that there could be alot to improve on, I think that this was a good first try for me.
Huy: Robocup has been a deeply rewarding experience for me, and has opened my eyes to the majesty and wonder of the robotics world. It has shown me that I am capable of doing anything and everything that I set my mind to, and that I should never be afraid to dream big.
Ian: My participation in Robocup has given me incredibly valuable, once-in-a-lifetime experience to bond with my fellow CCA mates, and build closer ties with our friends from overseas. I have also been able to improve myself, both in terms of my knowledge and skill set. Robocup has been a truly unforgettable experience that will stick with me for a lifetime.